Trike
 This page is also available in English.
This page is also available in English.
Op de WIKIPEDIA site wordt een trike als volgt omschreven; Een trike is een gemotoriseerde driewieler. Soms is hij gebaseerd op een motorfiets-voorgedeelte en een automotor met achteras, soms bestaat een trike alleen uit motorfietsonderdelen. De kleinste uitvoeringen (af-fabriek als trike gebouwd) worden ATC genoemd en onder meer in wedstrijden gebruikt. De meest bekende trikes worden gebouwd met een complete Volkswagen Keverachterkant (motor, versnellingsbak, differentieel en wielophanging). In het verleden werden driewielers met twee achterwielen Tricycle genoemd. In Nederland worden trikes gekenmerkt als autos en krijgen daarom een automobiel kenteken. In België beschouwt men trikes als motorfietsen, deze krijgen dus een motorfiets kenteken. In de jaren zestig en zeventig van de vorige eeuw ten tijde van de hoogtijdagen van de hippies wilden deze vrijgevochten mensen een bijbehorend voertuig. Zowel de auto als de motor kwam niet in aanmerking omdat een auto te burgerlijk was, zeker in Amerika, en de motoren te veel een Harley-imago hadden die te hard was voor de hippiecultuur. Daarnaast liet de betrouwbaarheid van de motorfietsen te wensen over. Deze betrouwbaarheid van de toenmalige motorfietsen is niet vergelijkbaar met wat we vandaag de dag in de motorzaken aantreffen. In Californië, het Mekka van het hippiedom, heeft een verlichte geest, waarschijnlijk onder invloed van één of andere drug, uit een oude zeer betrouwbare kever en een voorkant van een motorfiets een alternatief voertuig gemaakt dat wij nu kennen als trike.
Hoewel het hippiedom aan mij voorbij gegaan is (Bouwjaar 1961) vind ik het idee van een driewieler die buiten alle gebaande paden loopt en de daarbij behorende vrijheid van helmplicht een leuk idee. Ook al omdat het vrijheids gevoel van het motorrijden of de open uitvoering van een cabrio al door veel mensen ge(be)proeft is. Tijdens de eerste inventarisatie van hoe e.e.a. te bouwen kwam ik ook regelmatig krantenknipsels tegen die melding maakten van onverklaarbare eenzijdige ongevallen in bochten met trikes. (Later meer hierover.) Na enig snuffel werk en het bekijken van sommige ontwerpen en fotos van powertrikes vond ik het bouwen van een trike een echte uitdaging. Dat bouwen zou dan niet moeten gebeuren met de bekende kever achterkant maar anders. Anders omdat de techniek van de kever echt achterhaald is. Het basis ontwerp dateert van de jaren 30 in de 20e eeuw en is hierna niet meer structureel gewijzigd. Het basisprincipe van de kever was; eenvoudig, betrouwbaar en daardoor goedkoop. Welnu, dat is terug te vinden in de techniek. En hoewel eenvoudig en betrouwbaar nog steeds van toepassing is zijn 70 jaar technische ontwikkeling niet geheel weg te vlakken. Mijn doelstelling is een trike te bouwen die een uitstekende wegligging heeft, voldoende basis vermogen heeft, uitgerust is met een katalysator, een elektrische installatie heeft die voldoet aan de moderne eisen, een laag zwaartepunt heeft (Verticaal) waarbij het zwaartepunt liefst in het zwaartepunt van de driehoek (3 wielen) ligt (horizontaal) en uiteraard afdoende remvertraging om het gewenste vermogen in bedwang te kunnen houden. Om bovenstaande doelstelling te realiseren hebben de kevertrikes voor mijn doelstelling een aantal onoverkomelijke problemen.
Ten eerste; De motor. Een luchtgekoelde motor met een carburateur die met pijn en moeite 60/70Pk kan leveren bij een inhoud van 1500cc. Nou zijn er wel opgevoerde motoren te krijgen maar hierbij is altijd uitgegaan van dezelfde basis kevermotor en is het dus altijd een aanpassing en geen fundamenteel goed ontwerp. Luchtgekoeld is per definitie luidruchtiger dan een watergekoelde motor omdat bij deze motoren de ommanteling van de verbrandingskamer met water een grote geluiddemping geeft. Géén injectie en daardoor een beperkte mogelijkheid om de uitlaatgassen te regelen en te zuiveren.
Ten tweede; De achterkant van een is kever uitgerust met een torsievering. Een vierkante as die in een rubber draait, waarbij de rubbers dienst doen als veer en als demper. Een uiterste eenvoudige en onderhoudsarme constructie die niet of slechts beperkt instelbaar is. Bij het optimaal maken van de wegligging dient de vering en de demping onafhankelijk van elkaar ingesteld te kunnen worden.
Ten derde; De ligging van de motor/versnellingsbak combinatie in de trike. Doordat de motor en het grootste gedeelte van de versnellingsbak achter de centerlijn van de achteras liggen, ligt het zwaartepunt van de totale trike veel te ver naar achteren. Bij fel accelereren komt het voorwiel los van de grond. Dit probeert men op te lossen door de framebuis die naar het balhoofd loopt te vervangen door een massieve blok staal en/of door twee (steun)wieltjes aan de achterste carterbescherming te maken. Deze twee oplossingen zijn echter symptoombestrijding en geven géén structurele oplossing van het zwaartepunt probleem. Dit loskomen van de grond van het voorwiel als gevolg van te weinig druk op het voorwiel kan ook bij het rijden nadelige gevolgen hebben. Dit heet onderstuur. (Onderstuur = Als het stuur gedraaid wordt en de trike heeft toch de neiging om rechtdoor te gaan.) Voor wat betreft de eenzijdige ongevallen denk ik dat deze te wijten zijn aan een extreme vorm van onderstuur.
Ten vierde; Alle kevers hebben achter trommelremmen. Dit geldt dus ook voor de kevertrikes. Trommelremmen hebben een beperkte remkracht in vergelijking met schijfremmen, zijn onderhoudsgevoeliger en ogen niet modern. Nu zijn er ombouw sets van trommel naar schijf te krijgen, maar dat is toch behelpen.
Om een trike te bouwen die qua onderdelen en onderhoud courante artikelen heeft heb ik gekozen voor een boxermotor van een Alfa Romeo 33. Deze heeft een goede vermogen/inhoud verhouding af fabriek (1500cc/110pk of 1700cc/123pk), heeft Multi-pointinjectie en is in grote getale geproduceerd. Tevens ligt de motor hier vóór de versnellingsbak en vóór de centerlijn van de voorwielen. Daarnaast is het een boxer motor waardoor het zwaartepunt laag bij de grond ligt.
Door deze keuze heb ik het mezelf niet echt gemakkelijk gemaakt. De volgende uitdagingen stonden mij te wachten als gevolg van de keuze voor de Alfa Romeo:
1. Stuurbare voorwielophanging ombouwen tot een vaste achterwielconstructie.
Bij een kever is de achterwielophanging van het torsiestang/rubber type. Hierbij is de vering en demping in 1 element, de rubber bussen, ondergebracht. De wielnaven zijn vast, dat wil zeggen dat je het toespoor en wielvlucht niet kunt instellen. De voorkant van een Alfa Romeo is uitgerust met zgn. McPherson veerpoten. Dit is een veer schokdemper combinatie waarbij de veer centrisch om de schokdemper zit zodat het geheel de draaiing van de wielen kan volgen. Hierbij is middels de verstelling aan de stuurstang het toespoor in te stellen. De wielvlucht is beperkt instelbaar door de boutbevestiging van de naaf aan de McPherson poot.
2. Vloeistofkoeling i.p.v. luchtkoeling bij de kever.
Waar komt de radiateur en het expansievat? Hoe krijgt de radiateur voldoende lucht?
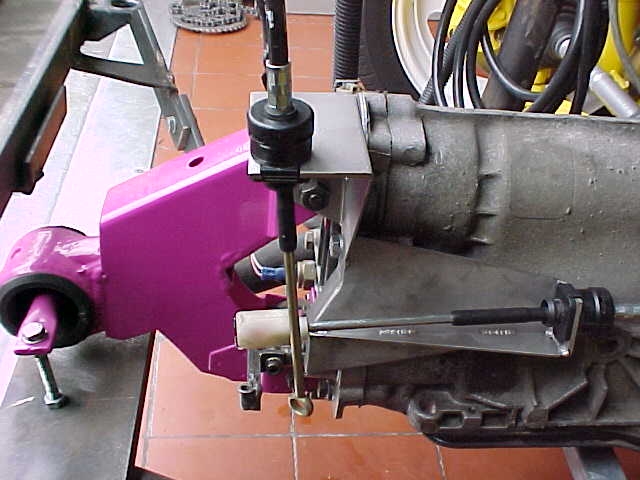
3. Schakelen van de versnellingsbak.
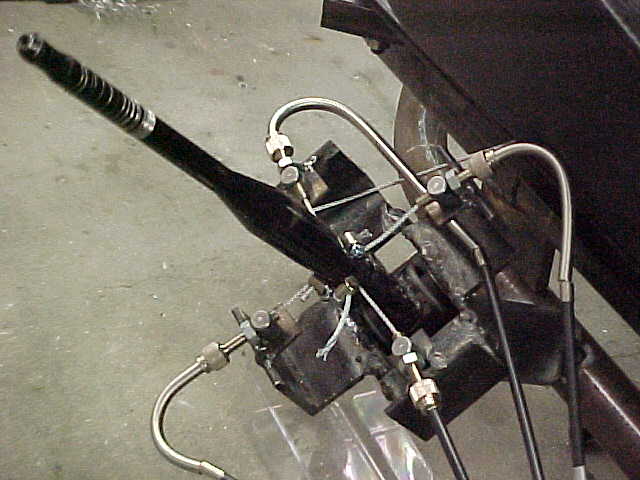
Omdat je bij een kever ook al vóór de motor/versnellingsbak zit is de standaard schakelstang van de kever voor de bouw van een trike bruikbaar. In de Alfa Romeo zit je achter de motorversnellingsbak combinatie en in mijn trike vóór de motorversnellingsbak combinatie. Hoe te bedienen?
4. Motormanagement hergebruiken in combinatie met de katalysator.
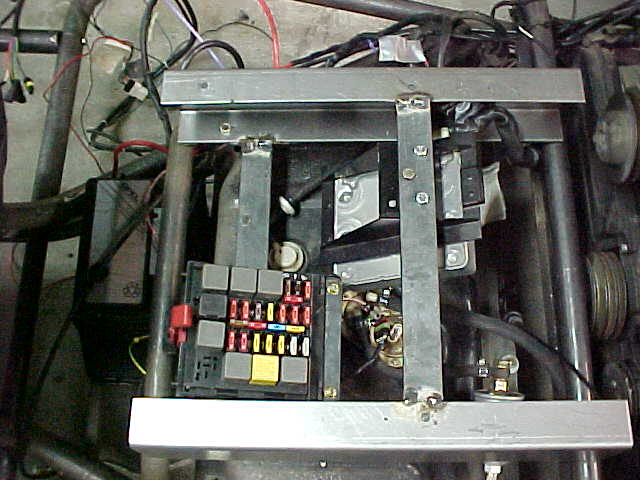
De door mij gekozen Alfa Romeo 33 heeft een BOSCH Motronic MP3.1 motor management systeem dat de motor regelt. (Injectietijdstip, ontstekingstijdstip, lucht/brandstofverhouding etc.) Zonder deze unit loopt de motor helemaal niet! De hele bekabeling dient ondergebracht te worden in de originele staat vanwege gesealde en bestekkerde kabels. Deze unit is los van alle andere elektra te de- en monteren als 1 kabelboom. Als gevolg hiervan moest ik een goede voorziening treffen om deze BOSCH Motronic MP3.1 droog onder te brengen. In de Alfa Romeo is deze ondergebracht achter het dashboardkastje.
5. Bekabeling en dashboard
Omdat er aan een Kever niet echt veel elektrische installatie zit zijn de standaard verkrijgbare kabelsets niet meer dan een uitgebreide kabelboom om een aanhangwagen aan te sluiten. Omdat ik toch een plek moest bedenken voor de BOSCH Motronic MP3.1 heb ik meteen een plek om de originele zekering- en relaiskast van de Alfa Romeo onder te brengen. Hierdoor zijn alle hedendaagse functies zoals alarmlichten, mistachterlicht, achteruitrijdlichten etc., aanwezig. Tevens ben ik zo akelig consequent geweest dat ik het originele Alfa Romeo schema heb aangehouden waardoor eventuele storingen makkelijker te verhelpen zijn. Overigens was deze zekering- en relaiskast ook nodig om de controle functies zoals temperatuurmeter, benzinetankmeter, oliedruklampje, laadstroomcontrolelampje, clignoteurverklikkerlampje en grootlichtindicator via het originele schema aan te sluiten. (bijkomend voordeel van de originele zekering- en relaiskast is dat ik de relais van b.v. de elektrische ramen, achterruitverwarming, kachelventilator en binnenverlichting kan gebruiken voor gadgets zoals bijvoorbeeld stoelverwarming, side markers, extra luchthoorn met een beetje vermogen etc.)
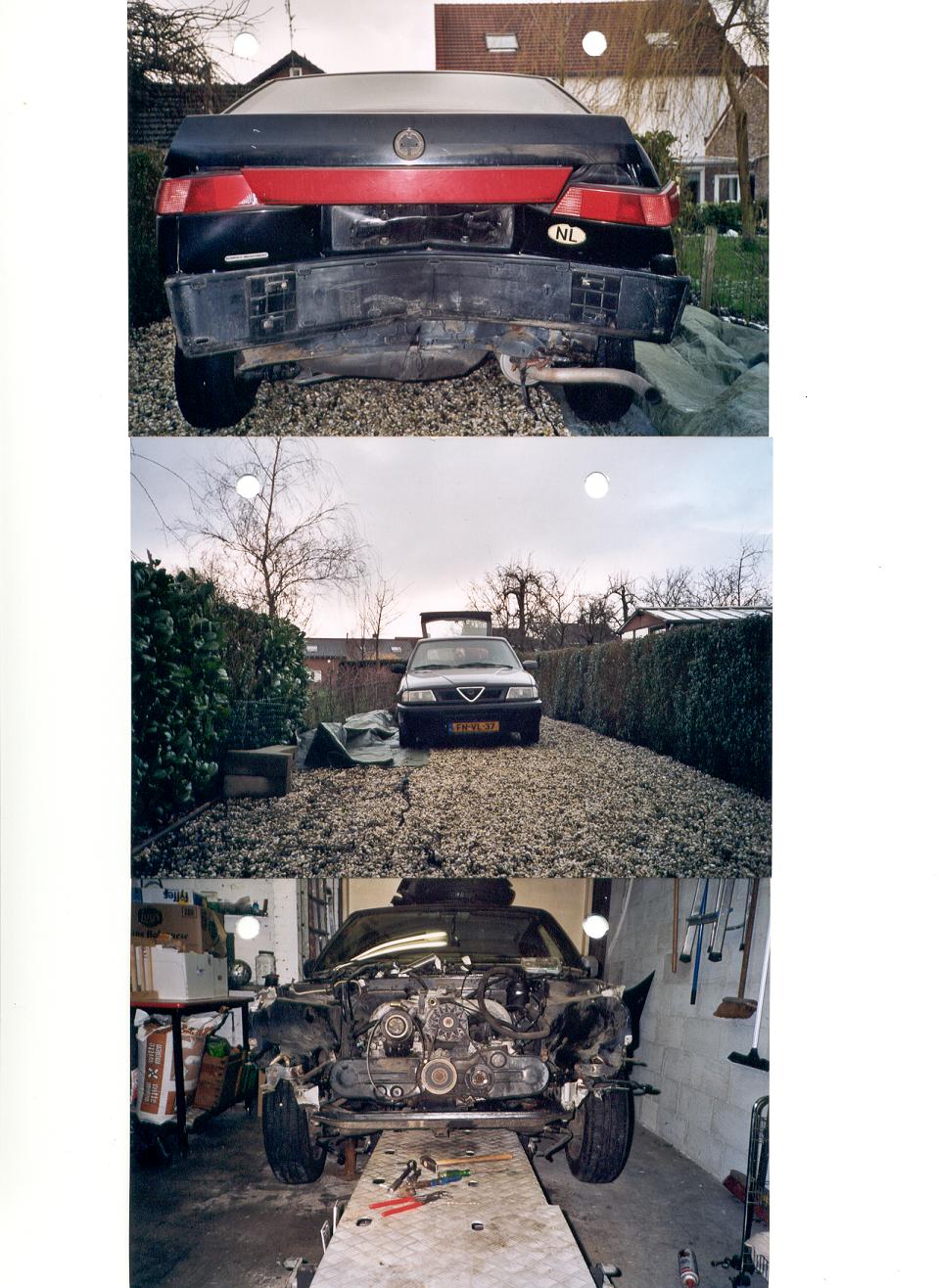
Nadat ik aan de hand van het bovenstaande bepaalt had dat het een Alfa Romeo moest worden ben ik op zoek gegaan. Bij Autobedrijf Jo Engelbert te Margraten vond ik een Alfa Romeo uit 1992 met schade aan de achterzijde en een knik in het dak, een total loss dus.


De auto was lopende en na een korte onderhandeling heb ik de auto via allerlei binnenwegen naar huis gereden. Daar ben ik begonnen met het demonteren van alle onderdelen. Deze heb ik zoveel mogelijk schoongemaakt met ontvetter en opgeslagen op de zolder van mijn garage. Wat ik niet nodig had heb ik afgevoerd naar de sloop. Niet gebruikt zijn de achteras en wielen, glas, achterbank, brandstoftank en carrosserie. Al het andere zal op de een of andere manier verwerkt worden. Het chassisnummer heb ik uit de beplating geknipt en bewaart.
De eerste stappen;
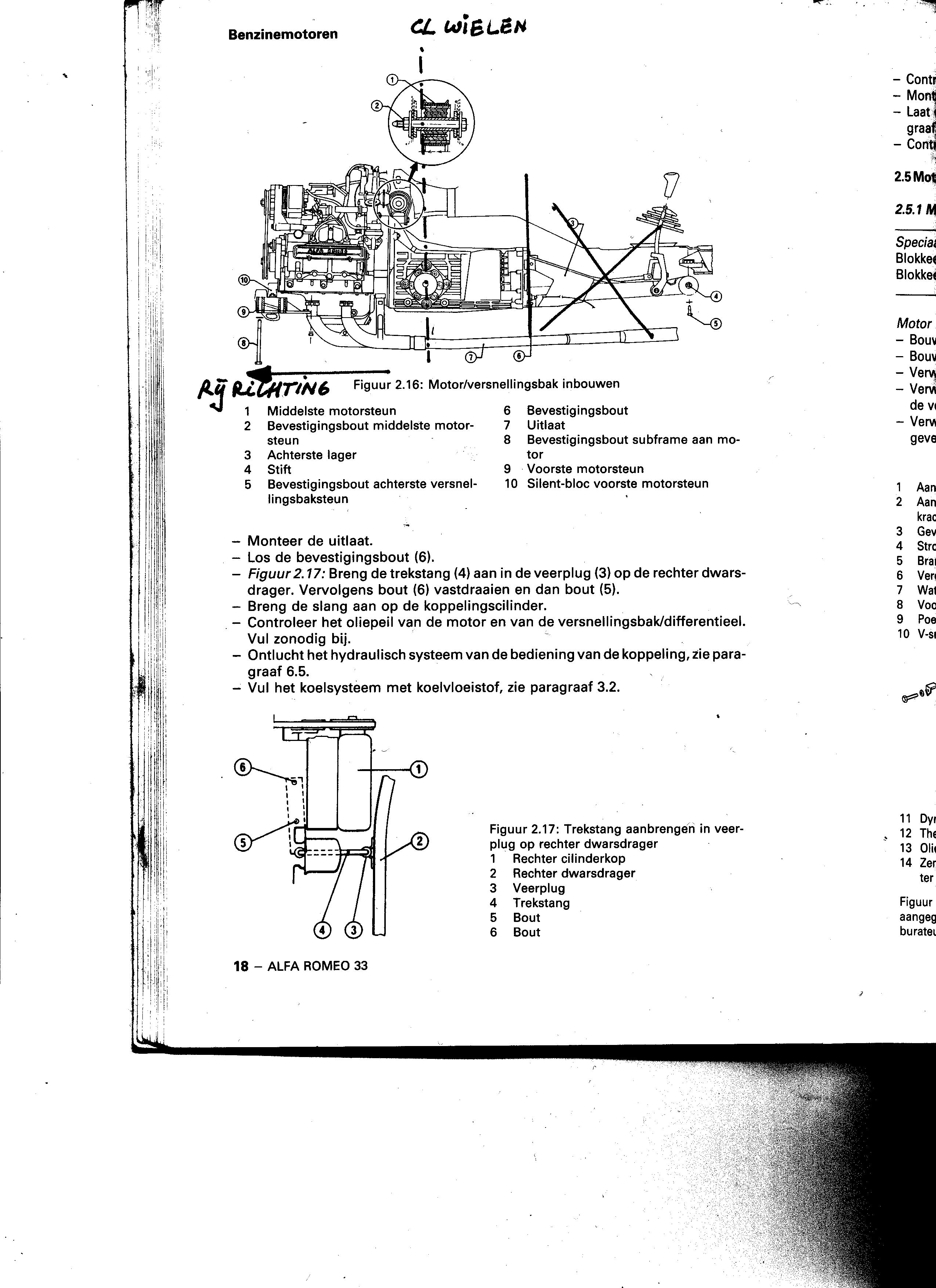
De totale aandrijflijn (motor, versnellingsbak, aandrijfassen en wielophangingen) heb ik ingemeten en vergeleken met de tekeningen die in de Vraagbaak Alfa Romeo 33 staan.
Als deze maatvoering in de nieuw te bouwen trike niet klopt kan zich dat uiten in versleten homokinetische koppelingen, vreemde bandenslijtage, versnelde lagerslijtage etc. Vanuit die maatvoering heb ik in vergelijking met de carrosserie een stalen pijp (ø42,3x3,5 mm) met een lengte van 6m in één keer gebogen tot de hoofddrager van het blok en de wielophanging.







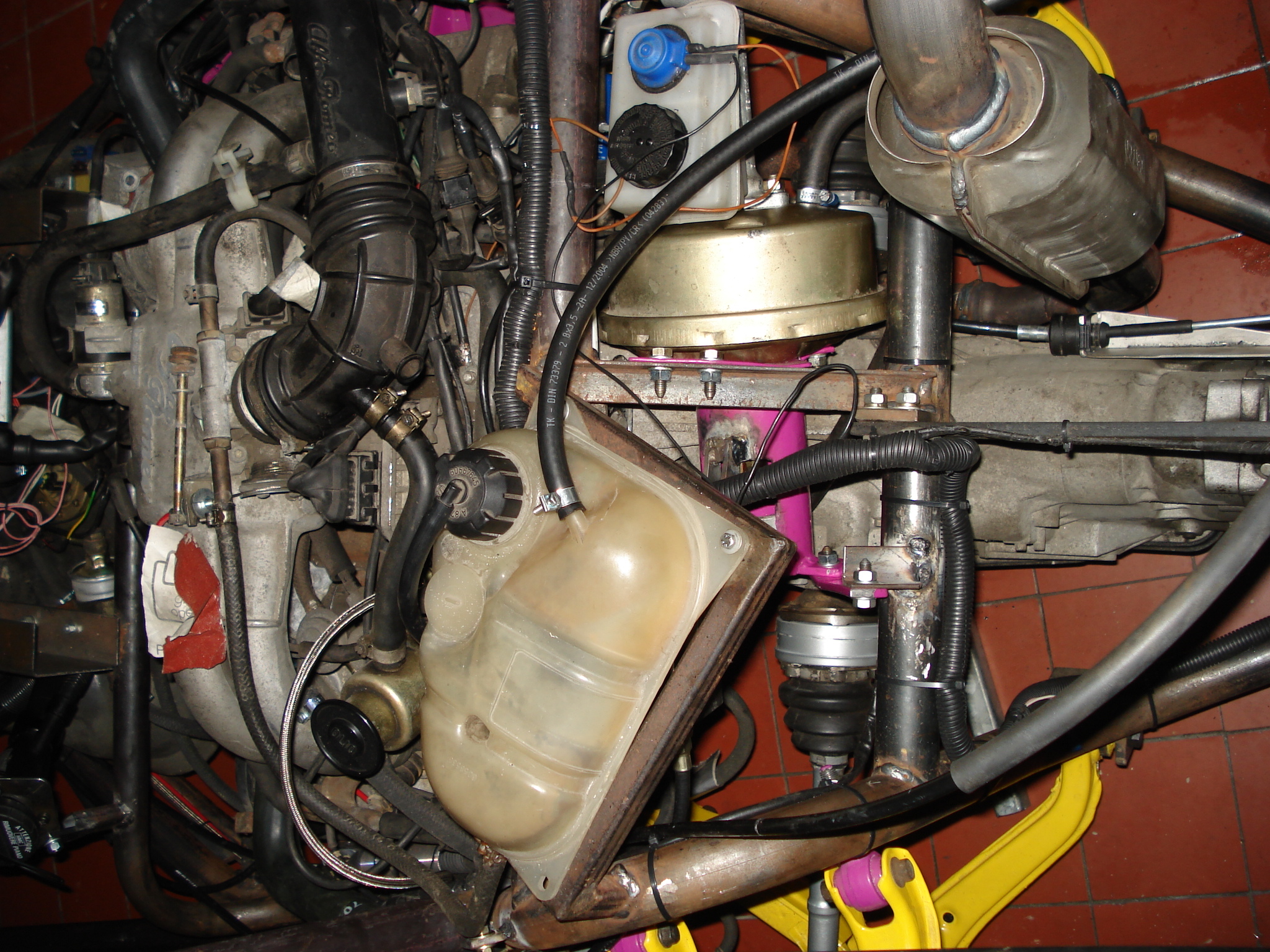
Dit was een heidens karwei omdat ik dat met de hydraulische handbuigpomp gedaan heb. Het was een kwestie van meten, buigen, meten, beetje meer buigen, meten etc. Daarna heb ik de dwarspijp geplaatst waarin het hoofdophangpunt van de motor zit. Daarna heb ik de twee ophangpunten van de subframe balk aan de voorzijde aangebracht. Het Alfa Romeo blok is aan één punt in het midden opgehangen, aan de voorzijde afgesteund op en silentrubber op de subframebalk en aan de achterzijde van de versnellingsbak in een rubber opgehangen. Daarnaast is er nog een kleine reactiearm aan de rechterzijde om de kantelkracht op te vangen. De onderste wieldraagarmen en reactiestangen incl. de stabilisatorstang zijn in originele positie ingebouwd met de subframebalk aan de voorzijde. De achterzijde van de versnellingsbak steunt af op de achterste punt van het buisframe. De verbinding tussen de uit één stuk gebogen hoofdframebuis aan de achterzijde en de bovenste balhoofdbuizen aan de voorzijde is gemaakt door een ø33,2mm buis in de ø42,5mm buis te lassen.

Deze twee passen bijna spelingloos in elkaar. Door het boren van gaten in de buitenste buis kan de binnenste buis vast gelast worden. De binnenpijp dient dan alleen als geleiding. De buitenbuizen zijn voldoende afgeschuind en rondom afgelast.
De McPherson veerpoten heb ik uit elkaar gehaald waarna ik een extra setje bij de autosloper gehaald heb om de stuurarmen te gebruiken. De originele stuurarmen heb ik gebruikt om de bovenste fusee te verbinden met de bovenste triangel. Deze triangel is afkomstig van een HONDA CIVIC.


De andere stuurarm heb ik naar de voorkant van de veerpoot bevestigd om een driepunts ophanging te creëren en daarmee ook de wieluitlijning te kunnen realiseren. De wieluitlijning gebeurt met originele Alfa Romeo stelmoeren van de stuurstangen. Omdat de McPherson uit elkaar gehaald is moest er een nieuwe veer en demper komen. Allereerst heb ik een inschatting gemaakt van het totale gewicht van de achterzijde en de gewenste veerweg. Aan de hand hiervan heb ik gekozen voor een veer/demper combinatie van een CBR600R, monoshock met N2 ondersteuning. Hierbij is de veervoorbelasting, de ingaande én de uitgaande demping instelbaar. Dit om een zo ideaal mogelijk afstelling te krijgen. De plaats van de veer/demper combinatie is bepalend voor het weggedrag van de trike. In de CBR600R ligt de veer/demper combinatie vrijwel horizontaal ingebouwd met een heel lange arm (achterbrug) en een overbrengingsmechanisme. Deze constructie maakt een vrij zware veer en demping nodig. Door deze zware veer en demping is deze veer/demper combinatie ideaal te gebruiken in de verticale stand bij zwaardere belastingen. De schijfremmen zijn hier standaard aanwezig.
Vóór de motor moest vanwege de plaats van het zwaartepunt de benzinetank komen. De originele Alfa Romeo tank wilde ik niet gebruiken vanwege zijn hoge bouwvorm en zijn externe benzinepomp. Ik heb een tank van een LANCIA genomen met ingebouwde niveaumeter en ingebouwde brandstofpomp.



Vooral de pomp en de pompaansluitingen zijn belangrijk omdat het injectiesysteem voldoende druk nodig heeft om te kunnen functioneren en omdat er een retourleiding aansluiting nodig is om het teveel verpompte benzine terug naar de tank te laten vloeien. Het ophangen van de tank is gebeurd in silentrubbers. De onderkant van de tank mag nooit het laagste punt van de trike zijn.
Omdat de lengte van de trike wettelijk beperkt is tot 4m kon ik géén schommelarmvork toepassen. Vanwege het gewicht en de stabiliteit heb ik gekozen voor een telescopische voorvork van een KAWASAKI ZZR1100. Buisdiameter 42 mm. Dubbele remschijf ø 310mm en een lichtmetalen wiel. Om de aansluiting van het frame aan het balhoofd stabiel en stevig te maken heb ik een nieuwe balhoofdbuis laten maken. De standaard balhoofdbuis van een motorfiets is vaak uit dunwandig materiaal gemaakt en daardoor moeilijker lasbaar aan de dikwandige buizen die ik gebruik. Nadat ik de lagers opgemeten had heb ik een tekening gemaakt en deze bij een draaierij laten draaien. Tevens heb ik hier de aanslagnokken voor de stuuruitslagbeperking op gemaakt. De stuuruitslag is anders dan bij de motorfiets.


Om het middenstuk van het frame stabiliteit te geven heb ik een vakwerkligger gemaakt vanaf de bevestiging van de subframebalk tot aan de splitsing van de bovenste en onderste balhoofdbuizen. De vakwerkliggerbestaat uit een ø42,5mm buis boven, stukken strip 60x40mm 8mm dik, h.o.h. 200mm en een buis ø33,2mm onder hierdoor ontstaat een sterk samengesteld geheel met een totale hoogte van 115,7mm. De afstand tussen de onderste balhoofdbuis en de twee bovenste balhoofdbuizen is in een driehoeksopstelling en is vanuit die geometrie zeer sterk
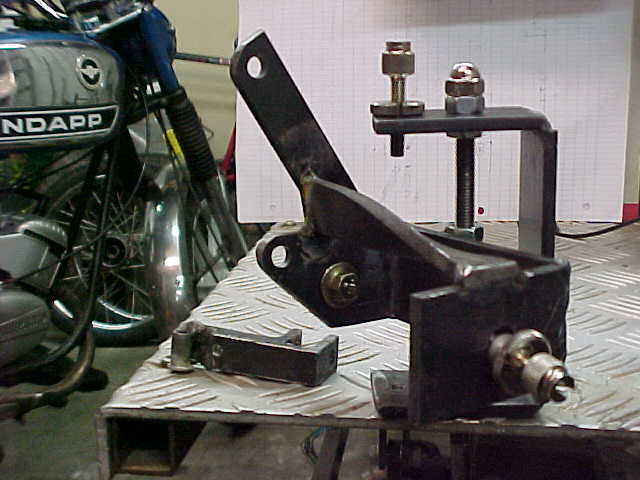
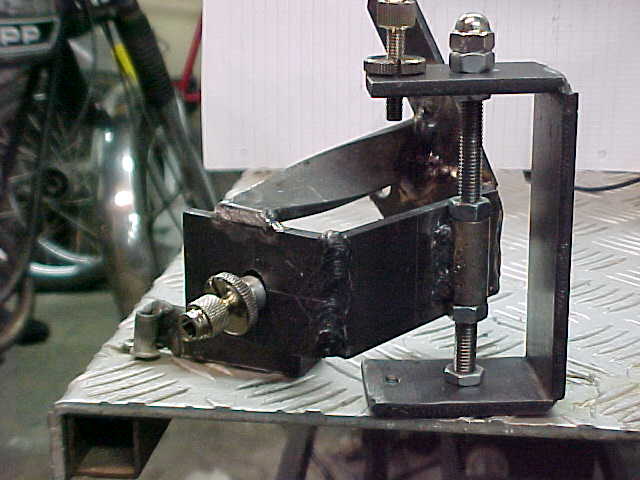
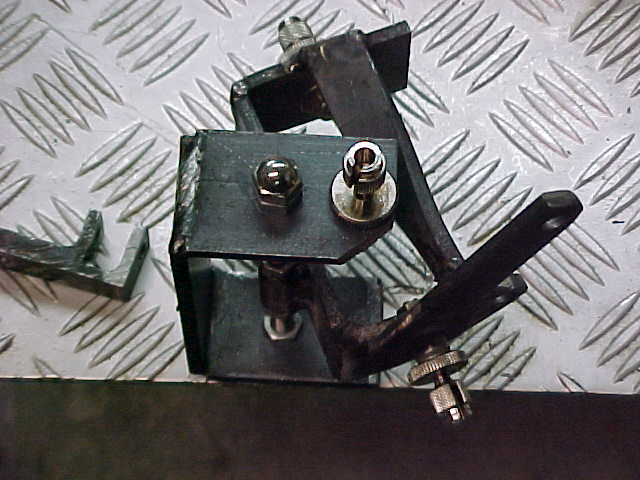
Om voldoende remkracht te hebben wilde ik de originele Alfa Romeo rembekrachtiger gebruiken. Om te voorkomen dat ik lange remleidingen zou moeten leggen en vanwege plaatsgebrek aan de voorzijde van de trike heb ik gekozen om de rembekrachtiger dwars boven de versnellingsbak te monteren.


Hierdoor zijn er slechts 2 leidinkjes van de hoofdremcilinder naar de wielen nodig, links en rechts, van ca. 70cm elk. Samen met de originele rembekrachtiger is ook de originele rempomp gebruikt. De gescheiden systemen heb ik gebruikt om linksachter en rechtsachter te scheiden.


De derde poort is afgeblind. De remschijven achter zijn nieuw. Deze heb ik voor de montage met hittebestendige verf behandeld zodat ze na een paar keer gebruiken niet zon akelig bruine roestkleur krijgen. De bediening van de remcilinder gebeurt door een hefboommechanisme dat doormiddel van een speciale bowdenkabel door het voetpedaal bediend wordt De voorrem hoofdcilinder is net als de voorvork van een KAWASAKI ZZR 1100 en dus helemaal afgestemd op de remklauwen.

Voor de slangen aan de voorzijde als ook aan de achterzijde heb ik RVS ommantelde teflon slangen genomen. Omdat alle 4 de remklauwen gepoedercoat zijn heb ik ze meteen ook compleet gereviseerd..
De koppeling is in de originele setting gebleven, de hoofdcilinder, master bij het pedaal



en de werkcilinder, slave, bij de koppeling. In de normale Alfa Romeo uitvoering is er 1 reservoir voor zowel de remmen als de koppeling. Nu heb ik om de master te voeden een reservoir van een achterrem van een motorfiets gebruikt. In een eerste fase had ik een hydrauliekslang laten maken die vanaf de master naar de slave loopt. Echter
. hydrauliek olie en remvloeistof zijn 2 totaal verschillende vloeistoffen. De hydrauliekslang is niet bestand tegen remvloeistof. Daarom heb ik ook hier een RVS ommantelde teflon slang laten maken van ca. 2,2m lang. Ik heb voor de aansluitingen speciale nippels moeten laten draaien om de verloop van BSP draad naar metrische draad te maken.
Omdat ik een trike wil met een fatsoenlijke wegligging en voorspelbaar weggedrag wil ik niet die grote hoge trike banden gebruiken. Ik heb velgen genomen van een NISSAN PATROL.



Deze heb ik omgebouwd. Naafplaat er uit, omgekeerd, naar binnen geplaatst en weer vast gelast. Uiteraard zonder slingering! Gebruikte bandenmaat 205/45 R 16.
De originele uitlaatbochten zijn gebruikt, daarachter is een nieuwe kleine geflensde katalysator geplaatst. De originele Alfa Romeo katalysator is veel te groot om her te gebruiken. De bevestiging van de lambda-sonde is vernieuwd. De einddemper is afkomstig van een SUZUKI R600R en is horizontaal achterop geplaatst met de opening naar de wegzijde voor rechtsrijdend verkeer.


Bevestiging is gebeurd middels silentrubbers. De gehele uitlaat is door de fa. USA te Maastricht vakkundig in elkaar gelast.
Alle slangen op het motorblok zijn vervangen door nieuwe. De aan- en afvoerpunten van de interieurkachel zijn kortgesloten. Omdat aan de voorzijde géén plaats is voor een grote radiateur heb ik deze achterop geplaatst. Bij de automaterialenhandel heb ik originele (Géén Alfa Romeo) voorgevormde bochten en lengtes ø33mm slang van 1m lang gehaald om de radiateur die nu ca. 80cm van de motorblok aansluitpunten zit aan te sluiten. Het expansietankje heb ik na een reinigingsbeurt op het hoogste punt geplaatst.

Momenteel heb ik achterlicht units gemonteerd van het fabrikaat TRUCK-LITE uit de USA.

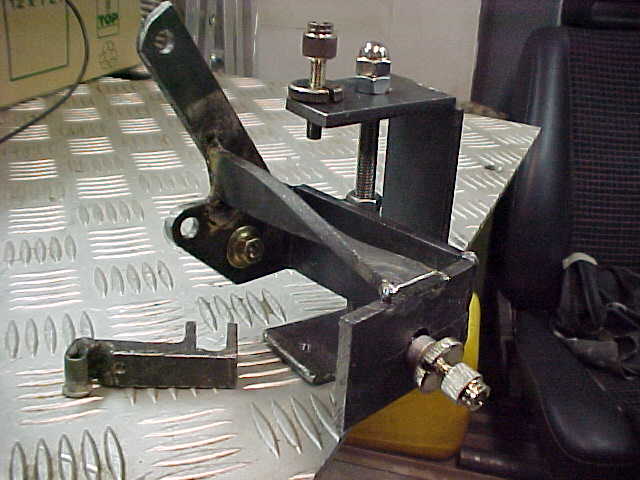
Hierin zijn alle benodigde lampen ondergebracht. Of deze zo blijven is afhankelijk van de polyester ombouw die ik nog moet maken. Aan de voorzijde heb ik een nieuwe universele koplamp gebruikt maar wel uitgerust met een 100/110W lampje. Dit geeft écht goed licht. De clignoteurs aan de voorzijde zijn bevestigd op een ø22mm dikwandige pijp. De bekabeling loopt door de pijp. Deze pijp dient tevens als bevestiging van de spiegels. Om de trike te kunnen vervoeren heb ik een speciaal hulpmiddel gemaakt dat midden onder de trike bevestigd wordt met 2 x M16 bouten in een pijpklem en waarbij het voorwiel op een UNP rust.




Om nu géén extra lichtbalk te hoeven gebruiken heb ik de verlichting achter uitgevoerd met een 7 polige stekker. Hierdoor heb ik alleen een verlengkabel nodig en kunnen de originele achterlichten van de trike dienst doen bij het transport achter een auto.


Ik heb het originele dashboard gebruikt, dus met de elektronische snelheidsmeter en toerenteller. Alle functies zoals (groot)licht indicatie, watertemperatuur, benzine niveau, oliedruk etc. zijn geïnstalleerd.
Het motormanagement systeem werkt alleen als het op het motorvacuüm is aangesloten. De gehele unit is met een 40-polige stekker bevestigt aan een gesealde kabelbundel die alle functies van het motorblok controleert. Oliedruk, watertemperatuur op 3 plaatsen, benzinepompdruk, vacuüm, benzine inspuithoeveelheid, luchthoeveelheid, ontstekingstijdstip aan de hand van de rotatie van het vliegwiel en de lambda-sonde. Het systeem is volledig losgekoppeld van de overige elektrische bedrading van de trike zoals de verlichting, startmotor, claxon etc.
Op 9 april 2007 hebben we een uitgebreide testrun gedaan van ca. 1 uur. Koeling; OK, Olietemperatuur en peil; OK, acceleratievermogen; OK, wegligging; OK,OK,OK,OK,OK! Zie bijgesloten filmpjes en foto.
Klik voor de filmpjes
hier en
hier en zet het geluid hard!!!
RDW Keuring
Na een beetje oponthoud, -er moest toch een nieuw huis gebouwd worden-, heb ik de RDW keuring aangevraagd. In eerste instantie komt een keurmeester op locatie de voorkeuring uitvoeren. Dit om te voorkomen dat totaal kansloze ontwerpen niet naar Lelystad hoeven af te reizen. Een paar hints en een kort rapport met wijzigingen waren hiervan het resultaat. Aan te passen zijn:
-Chassis nr laten inslaan door RDW.
-Type plaatje maken (Was ik nog niet aan toe gekomen omdat ik nog geen chassis nr heb.)
-Scherpe delen afschermen (Voorspatbord, achterspatborden, vorkdelen)
-3e remlicht uitschakelen
-Bevestiging kenteken plaat wijzigen (Moet hoger tov grond staan min 300mm))
-Remsysteem aanpassen (Slechts 1 bediening voor alle 3 de wielen)
-Claxon naar voren richten vanwege testmeting
-Schets met maximale aslasten maken zodat deze vergeleken kunnen worden met de maximale belasting van de banden.
Afspraak gemaakt met de RDW Venlo voor het inslaan van het Chassis nr. Dat heeft nogal wat voeten in aarde gehad. Normaal wordt het kenteken ingeslagen als je een los frame en motorblok/versnellingsbak meeneemt. Dit is om te voorkomen dat gestolen spullen in elkaar worden gezet en als nieuw ingezet worden. Mijn frame was duidelijk nog nooit gebruikt, het was nog blank staal maar het motorblok gaf een probleem. Na een zoektocht naar het ingeslagen nummer bleek dat Alfa Romeo bij deze serie blokken (nog) geen uniek nummers gebruikte. De keurmeester van de RDW was zo vriendelijk om naar AR Nederland te bellen en dit te controleren.
Na het uitvoeren/aanbrengen van de wijzigingen heb ik telefonisch een afspraak gemaakt bij de RDW Lelystad met de betreffende medewerker.
Op maandag 28 februari 2011 om 08:30u was het zover. Na een ritje van 240km met de Trike achter de auto op een aanhanger werd mijn baby door derden bemonsterd en gekeurd....Peentjes zweten.
Deze keuring heeft tot ca. 15:30u geduurd!! En ik had geen brood mee...........
Keuring omhelst o.a.:
Bepalen van de afmetingen: Spoorbreedte, Wielbasis, hoogte van lampen tov grond, afstand van de lampen tov buitenzijde van de trike. Daarna wegen, remmentest op de testbank. Meting van de pedaalkracht bij maximale vertraging. Dit mag max 500N (ongeveer 50Kg) zijn.
Na de testen en metingen in de werkplaats gaat de inspecteur rijden op de testbaan. Hier worden geluidsmetingen gedaan, remproeven, rijgedrag bij hoge snelheden en de symetrie/geometrie bepaald. Dit laatste gebeurt als volgt: In de tweede versnelling bij 1.000 rpm (Iets meer dan stationair) wordt het stuur helemaal naar rechts gedraaid. dan wordt het stuur losgelaten en moet het binnen de 10 seconden in de "rechtdoor"-stand staan. Daarna gebeurt hetzelfde met het stuur naar de linkerzijde. Belangrijk aan deze meting is niet hoe lang het duurt voordat het stuur zich weer centraal gericht heeft, 2 of 8 seconden, maar dat de 2 tests, links en rechts een gelijke waarde geven! Dus rechts 9 seconden en links 3 seconden is afkeur. Geen goede zelfrichtende eigenschappen.
Parkeerrem wordt getest op een helling 16%. Snelheidsmeter wordt geijkt. Mag teveel aangeven maar NOOIT te weinig. En, een klein detail maar toch, moet een verlichting hebben zodat hij ook bij nacht leesbaar is.
Uiteraard was mijn trike niet de eerste keer goedgekeurd. Maar zo weinig punten had ik nu ook weer niet verwacht.een
-Parkeerrem op 2 achterwielen (Ik had de parkeerrem slechts op 1 achterwiel gemaakt)
-Dimlicht is niet in orde. Er is geen scherpe lijn tussen licht en donker. (De lampen die ik gekocht had voldeden dus niet!! Ondanks het E4 keurmerk in het glas.)
-Spiegels staan te laag en geven een niet volledig beeld van het achterliggend stuk weg.
-Achterspatborden zijn niet deugdelijk. Met name de voorzijde geeft gevaar voor voetgangers bij eventueel contact.
-Scherpe delen afschermen. Nog verder doorgevoerd dan de voorkeuring.
-Afscherming van de accu is onvoldoende.
Na een paar uurtjes denkwerk en aanpassen zijn bovenstaande punten opgelost. Herkeuring aangevraagd en op 9 mei 2011 mag ik terug naar Lelystad.
Alles in orde. Alleen nog BPM afrekenen en de rekening aan de RDW betalen en ik krijg een kenteken. Het eerste kenteken dat ik krijg is niet in orde, massa ledig voertuig staat op 60 Kg, moet zijn 600Kg. Op kosten van RDW een nieuw kenteken ontvangen. Soms zijn er dingen gratis in dit land..
Na de zomer van 2011, die niet echt schitterend was, heb ik de trike weer helemaal uit elkaar gehaald om alle onderdelen te laten poedercoaten. Zie bijgaande foto's. Nu de polyester beplating nog afmaken.